









STEP 10
You have two options how to use our system in cooperation with Gremsy:
- You will use ENTIRE & MavCam only control tilt / yaw of the gimbal via HereLink hw wheel / on-screen joystick.
- In this case is setting simple:
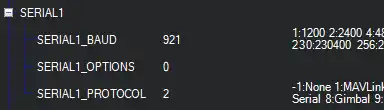
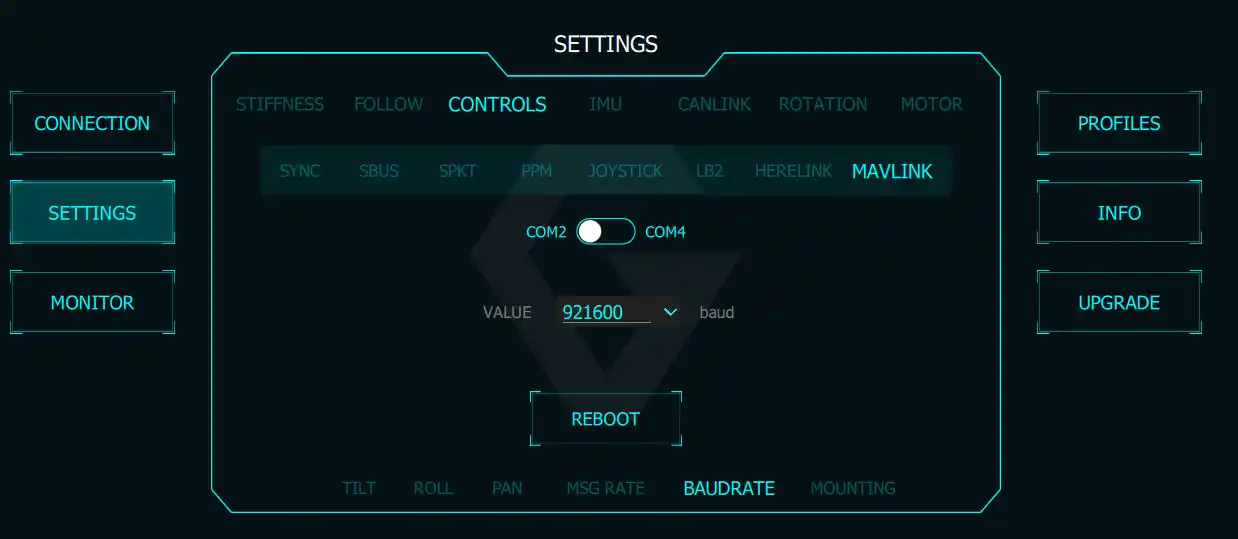
- SERIAL1_PROTOCOL: “Mavlink2”
- SERIAL1_BAUD: “921600“
- MNT1_TYPE: “0”
- MNT2_TYPE: “0
- In this case is setting simple:
- Use new Ardupilot gimbal control fatures (like point gimbal automatically)
- In this case, gimbal will be controlled by the Cube and ENTIRE & MavCam will command Cube directly to control attitude of the gimbal. For this case you have to set:
- SERIAL1_PROTOCOL: “Mavlink2”
- SERIAL1_BAUD: “921600“
- MNT1_DEFLT_MODE: “3”
- MNT1_TYPE: “6”
- RC6_OPTION: “214”
- RC7_OPTION: “212”
- RC8_OPTION: “213”
- MNT1_RC_RATE: “90”
- In this case, gimbal will be controlled by the Cube and ENTIRE & MavCam will command Cube directly to control attitude of the gimbal. For this case you have to set:
- For newest Ardupilot firmwares you need to also set:
- CAM1_TYPE: “5”
- If you do not have this option in your Ardupilot firmware parameters, ENTIRE will work by default.
(IF YOU USED TELEM2, USE SERIAL2 | MNT2)