Entire generates MavLink v2 by default, but you can switch to MavLink v1 by enabling “Convert data to MavLink v1”
When Entire detect trigger event (does not matter how trigger is generated): via PWM / via SBUS / via AIR Commander Link / via Entire’s internal trigger “by Time” or “by “Flown distance”, Entire can inject (generate) MavLink command for trigger photo by the camera. There are two options for MavLink trigger execution:
DO_DIGICAM_CONTROL command packet
START_CAPTURE command packet (set to single trigger)
NoticeFeatures like DJI to MavLink conversion are implemented per customer
requests and contains only features needed for those scenarios. Feel free to contact us if your usage scenario needs some additional feature or option.
who would like to use camera with MavLink interface for geotagging and control. Especially cameras like:
Wiris
Sentera
MicaSense
any other MavLink accessory or camera
How it works
Data reception:
Entire will receive GPS position data, ATTITUDE data, TIME and other data via DJI API streams
Additionally ATTITUDE can be enhanced by actual gimbal angles read from Gremsy COM port
Data generation:
Based on received data, Entire will generate MavLink packets with appropriate information through MavLink Passthrough port.
Output MavLink baudrate is configurable
Output MavLink version (v1 or v2) is configurable
Supported MavLink packets:
Packets generated by the Entire based on DJI API input:
HEARTBEAT (1Hz)
GPS_RAW_INT (10Hz)
GLOBAL_POSITION_INT (10Hz)
ATTITUDE (10Hz)
SYSTEM_TIME (1Hz)
COMMAND_LONG:
MAV_CMD_DO_DIGICAM_CONTROL
MAV_CMD_IMAGE_START_CAPTURE
Basic MavLink output parameters:
Source System: 1
Target System: 1
Generating device: AUTOPILOT1
Settings of DJI API via DJI Assistant
Connect the drone via USB to DJI Assistant
Select A3 / N3 unit
In the MENU select “SDK”
Configure Baud rate 230400 (default)
Timestamp 1Hz
Attitude Quaternions 100Hz
Position 100Hz
GPS 1Hz
Gimbal Data 100Hz
Flight Status 1Hz
All other fields set as “Do Not Send”
Click to Enable API if not enabled
notice: This step is critical, majority of issues is caused by wrong settings of API.
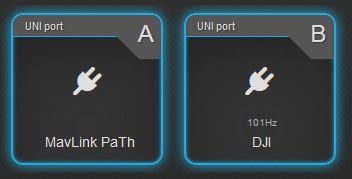
Configure ports in the Entire
Select any UNI port and set it to DJI mode
Select any other UNI port and set its mode to MavLink PassThrough
Configure MavLink baudrate in the Entire’s MENU
Navigate to MENU -> Miscelanneous -> MavLink OUT baudrate
Set value to match camera settings / manual
Optional settings
Entire generates MavLink v2 by default, but you can switch to MavLink v1 by enabling “Convert data to MavLink v1”
When Entire detect trigger event (does not matter how trigger is generated): via PWM / via SBUS / via AIR Commander Link / via Entire’s internal trigger “by Time” or “by “Flown distance”, Entire can inject (generate) MavLink command for trigger photo by the camera. There are two options for MavLink trigger execution:
DO_DIGICAM_CONTROL command packet
START_CAPTURE command packet (set to single trigger)
NoticeFeatures like DJI to MavLink conversion are implemented per customer
requests and contains only features needed for those scenarios. Feel free to contact us if your usage scenario needs some additional feature or option.