Here is a list of cables you will need for direct connection of Sony ILX-LR1 to the Pixhawk / Ardupilot / Cube flight controller for geotagging and control of the camera.
Pixhawk cable:
ILX-LR1 connection harness (this cable comes pre-connected together with uBEC) This harness will supply you connector to power up the camera and the ENTIRE togehter. Also it supplies trigger feedback connection, trigger capture connection and USB connection from the ENTIRE to the camera.
Connect USB-C connector of wiring set to USB-C connector of the ILX-LR1 camera.
CONNECTOR ORIENTATION!Connector needs to be connected in right orientation!
Correct direction is with "zig-zag joint side" of USB-C connector aiming to side of HDMI port. There is no risk of damage when inserted reversed, just USB connection will not work properly.
STEP 2
Use 6-pin Molex connector (biggest one) at pre-connected harness to connect the ILX-LR1 main connector.
STEP 3
Connect the ENTIRE unit USBMULTI connector with proper end with 9pin JST SH connector.
Connect the ENTIRE unit EXT port with proper 3pin JST SH connector of pre-connected harness
Connect the ENTIRE unit PWR connector with 2pin JST SHconnector from uBEC
STEP 4
Connect Pixhawk cable to ENTIRE’s UNI-C port
STEP 5
Connect other end of the Pixhawk cable to the Pixhawk Cube telemetry port TELEM1 (or TELEM2)
STEP 6
At this point you can connect power to JST SYP (RED one) connector.
CHECK POLARITY! MAKE SURE YOU FOLLOW CAMERA min/max VOLTAGE 10-18V!
Click to the “UNI port C” bar and in the new window select MavLink & baudrate of 1 250 000. The port should become “online” in a few seconds, if not, do not use other baudrates or other port modes. Check baudrate settings in the Cube (steps above)
Numbers under the icon are input GPS/ATTI stream corresponding to incoming GPS updates frequency and Attitude update frequency. The optimal is 50/10, but numbers may float a bit.
STEP 5
Open MENU -> (geotagging) Settings
From the list select “GPS data preview”
In the popup you should get similar data if the GPS / RTK has enough signal.
Data preview popup is real-time and should change as drone / gimbal moves.
ENTIRE needs to be set to “USB Control” mode and updated to the latest firmware to have this procedure working.
Navigate to MENU->Capture detection and set to “Hotshoe sync” – important for high acurracy and reliability!
STEP 2
Enable GeoTagging via ENTIRE MENU->Logging mode-> Direct EXIF
STEP 3
Select camera mount mode to fixed mount depending on your mount of the camer in the drone
FIXED TOP
Camera top is aimping top and lens is looking in direction of the flight
FIXED FORWARD
Camera top is aiming in direction of the flight and lens is looking straigh down
FIXED LEFT/RIGHT
Camera top is aiming left or right and the lens is looking straight down
STEP 4
Select camera Pitch / Yaw offset if camera is not fixed in 90degree offset steps
This step is optional and usually skipped
STEP 5
Open the MENU -> (Geotagging) Settings
Scroll down to Other features
And insert X, Y, Z offsets.
When GPS is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna.
When RTK is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna A.
Offsets are in millimeters!
STEP 6
Open camera MENU and navigate to: SETUP->USB->USB Connection Mode->MassStorage
STEP 7
Open camera MENU and navigate to: NETWORK->Cnct./PC Remote->PC Remote Function->OFF
STEP 8 – GEOTAGGING TEST
Your setup is ready to be used at this point
Entire has Self-Test routines for GeoTagging to easily check if all wiring is working well
Make sure that all equipment is turned ON and camera is set to MASS STORAGE MODE
Click to MENU->Configuration test and let the Entire to do a self-test
At the beginning of the test, one photo will be triggered
Entire will check if HotShoe sensor has properly recognized trigger
Entire will check all necessary input data connections
In case of any problems, result will provide hints to solve the issue
Test photo will not be geotagged in the test method!
STEP 9
Check how geotagging works before first tests!
Understanging of geotagging procedure will save you lots of confusion during testing phase
Open camera MENU and navigate to NETWORK->Network Option->Access Authen. Settings Open this item and in submenu DISABLE authentication Confirm all warnings OK Access Authen. Settings should be OFF
STEP 2
Navigate to: NETWORK->Wi-Fi->Access Point Set And enter item Wait for scan of available accesspoints
STEP 3
From the list of networks select Accesspoint of the ENTIRE Entire_xxxx Confirm OK
STEP 4
Camera will connect the ENTIRE via WiFi now Once done, confirm OK for return to the list
STEP 5
Click right (MANUAL SETTINGS) on the ENTIRE’s WiFi item to enter manual IP settings
Scroll to IP Address settings “Auto” and change to “Manual”
STEP 6
Fill IP addresses and masks:
192.168.122.1 255.255.0.0 192.168.10.1
Confirm OK
Camera will now re-connect the ENTIRE
STEP 7
Once connection is done, scroll up to “Wi-Fi Connect” and turn it ON
STEP 8
Navigate to: NETWORK->Cnct./PC Remote->PC Remote Function->ON
STEP 9
Now scroll to PAIRING and enter item
Wait for initialization
Once pairing confirmation for the ENTIRE shows, confirm OK
*** YOU HAVE TO REPEAT THIS STEP AFTER EACH UPDATE OF THE ENTIRE FIRMWARE ***
STEP 10
Make sure your camera is set to M exposure mode, or A/S exposure mode. Camera is by default set to Inteligent exposure mode, where Iris / Speed are calculated automatically and can not be changed by user / remotely.
STEP 11 – EXPOSURE CONTROL TEST
WiFi control should be now available together with the geotagging via USB. You can control exposure values via MavCam / ENTIRE’s web page, AIR Commander Link or MissionPlanner plugin.
WARNING!Remember to turn the camera OFF by power off switch! DO NOT DISCONNECT POWER otherwise all setings will be lost and you will have to start over!
Firmware updatePairing needs to be done again after ENTIRE's firmware update!
Info!WiFi connection is not initiated by the ENTIRE, camera is responsible for re-connection after reboot. ENTIRE is only "available" for camera connection.
Thanks to this is connection stable and does not break ENTIRE's hotspot presence during setup.
Installation basics
Here is a list of cables you will need for direct connection of Sony ILX-LR1 to the Pixhawk / Ardupilot / Cube flight controller for geotagging and control of the camera.
Pixhawk cable:
ILX-LR1 connection harness (this cable comes pre-connected together with uBEC) This harness will supply you connector to power up the camera and the ENTIRE togehter. Also it supplies trigger feedback connection, trigger capture connection and USB connection from the ENTIRE to the camera.
Connection to the ILX-LR1
STEP 1
Connect USB-C connector of wiring set to USB-C connector of the ILX-LR1 camera.
CONNECTOR ORIENTATION!Connector needs to be connected in right orientation!
Correct direction is with "zig-zag joint side" of USB-C connector aiming to side of HDMI port. There is no risk of damage when inserted reversed, just USB connection will not work properly.
STEP 2
Use 6-pin Molex connector (biggest one) at pre-connected harness to connect the ILX-LR1 main connector.
STEP 3
Connect the ENTIRE unit USBMULTI connector with proper end with 9pin JST SH connector.
Connect the ENTIRE unit EXT port with proper 3pin JST SH connector of pre-connected harness
Connect the ENTIRE unit PWR connector with 2pin JST SHconnector from uBEC
STEP 4
Connect Pixhawk cable to ENTIRE’s UNI-C port
STEP 5
Connect other end of the Pixhawk cable to the Pixhawk Cube telemetry port TELEM1 (or TELEM2)
STEP 6
At this point you can connect power to JST SYP (RED one) connector.
CHECK POLARITY! MAKE SURE YOU FOLLOW CAMERA min/max VOLTAGE 10-18V!
MavLink configuration
STEP 1
Connect your PixHawk to PC and connect it via Mission Planner
Open Settings Bookmark
From left MENU select FULL PARAMETER TREE
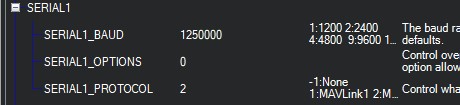
Find section named SERIALx (x is number of port you used)
Configure proper Telemetry port to the budrate of 1 250 000bps
Configure proper Telemetry port to the MavLink2 protocol
STEP 2
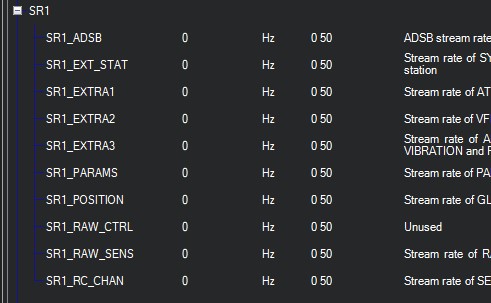
Search section named SRx (x is number of port you used)
Make sure all SRx items are set to 0
STEP 3
For newest Ardupilot firmware set CAM1_TYPE to 5 (MavLink)
If you do not have this parameter in the list, ENTIRE will work without this configuration.
If you use CAM1 mount already, you can use also CAM2_TYPE
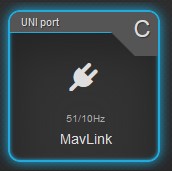
Click to the “UNI port C” bar and in the new window select MavLink & baudrate of 1 250 000. The port should become “online” in a few seconds, if not, do not use other baudrates or other port modes. Check baudrate settings in the Cube (steps above)
Numbers under the icon are input GPS/ATTI stream corresponding to incoming GPS updates frequency and Attitude update frequency. The optimal is 50/10, but numbers may float a bit.
STEP 5
Open MENU -> (geotagging) Settings
From the list select “GPS data preview”
In the popup you should get similar data if the GPS / RTK has enough signal.
Data preview popup is real-time and should change as drone / gimbal moves.
USB configuration for EXIF geotagging
STEP 1
ENTIRE needs to be set to “USB Control” mode and updated to the latest firmware to have this procedure working.
Navigate to MENU->Capture detection and set to “Hotshoe sync” – important for high acurracy and reliability!
STEP 2
Enable GeoTagging via ENTIRE MENU->Logging mode-> Direct EXIF
STEP 3
Select camera mount mode to fixed mount depending on your mount of the camer in the drone
FIXED TOP
Camera top is aimping top and lens is looking in direction of the flight
FIXED FORWARD
Camera top is aiming in direction of the flight and lens is looking straigh down
FIXED LEFT/RIGHT
Camera top is aiming left or right and the lens is looking straight down
STEP 4
Select camera Pitch / Yaw offset if camera is not fixed in 90degree offset steps
This step is optional and usually skipped
STEP 5
Open the MENU -> (Geotagging) Settings
Scroll down to Other features
And insert X, Y, Z offsets.
When GPS is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna.
When RTK is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna A.
Offsets are in millimeters!
STEP 6
Open camera MENU and navigate to: SETUP->USB->USB Connection Mode->MassStorage
STEP 7
Open camera MENU and navigate to: NETWORK->Cnct./PC Remote->PC Remote Function->OFF
STEP 8 – GEOTAGGING TEST
Your setup is ready to be used at this point
Entire has Self-Test routines for GeoTagging to easily check if all wiring is working well
Make sure that all equipment is turned ON and camera is set to MASS STORAGE MODE
Click to MENU->Configuration test and let the Entire to do a self-test
At the beginning of the test, one photo will be triggered
Entire will check if HotShoe sensor has properly recognized trigger
Entire will check all necessary input data connections
In case of any problems, result will provide hints to solve the issue
Test photo will not be geotagged in the test method!
STEP 9
Check how geotagging works before first tests!
Understanging of geotagging procedure will save you lots of confusion during testing phase
Open camera MENU and navigate to NETWORK->Network Option->Access Authen. Settings Open this item and in submenu DISABLE authentication Confirm all warnings OK Access Authen. Settings should be OFF
STEP 2
Navigate to: NETWORK->Wi-Fi->Access Point Set And enter item Wait for scan of available accesspoints
STEP 3
From the list of networks select Accesspoint of the ENTIRE Entire_xxxx Confirm OK
STEP 4
Camera will connect the ENTIRE via WiFi now Once done, confirm OK for return to the list
STEP 5
Click right (MANUAL SETTINGS) on the ENTIRE’s WiFi item to enter manual IP settings
Scroll to IP Address settings “Auto” and change to “Manual”
STEP 6
Fill IP addresses and masks:
192.168.122.1 255.255.0.0 192.168.10.1
Confirm OK
Camera will now re-connect the ENTIRE
STEP 7
Once connection is done, scroll up to “Wi-Fi Connect” and turn it ON
STEP 8
Navigate to: NETWORK->Cnct./PC Remote->PC Remote Function->ON
STEP 9
Now scroll to PAIRING and enter item
Wait for initialization
Once pairing confirmation for the ENTIRE shows, confirm OK
*** YOU HAVE TO REPEAT THIS STEP AFTER EACH UPDATE OF THE ENTIRE FIRMWARE ***
STEP 10
Make sure your camera is set to M exposure mode, or A/S exposure mode. Camera is by default set to Inteligent exposure mode, where Iris / Speed are calculated automatically and can not be changed by user / remotely.
STEP 11 – EXPOSURE CONTROL TEST
WiFi control should be now available together with the geotagging via USB. You can control exposure values via MavCam / ENTIRE’s web page, AIR Commander Link or MissionPlanner plugin.
WARNING!Remember to turn the camera OFF by power off switch! DO NOT DISCONNECT POWER otherwise all setings will be lost and you will have to start over!
Firmware updatePairing needs to be done again after ENTIRE's firmware update!
Info!WiFi connection is not initiated by the ENTIRE, camera is responsible for re-connection after reboot. ENTIRE is only "available" for camera connection.
Thanks to this is connection stable and does not break ENTIRE's hotspot presence during setup.