Here is a list of cables specific for Pixy-S installation. All cables needed for installation are included in Gremsy NEO set for Pixy-S.
Important!Do not skip steps or dismiss if result is not as described. If system does not behave as described, check again wiring and configuration.
Firmware!Majority of features used here are available only with latest firmware!
Make sure you updated your ENTIRE and also Gimbal to latest firmware!
CompatibilityThis new set is compatible with all new features of aArdupilot for Gremsy. Connection between flightcontroller and Gremsy is not affected. Our cable set only adds connection of COM4 to the ENTIRE for geotagging and gimbal angles reading.
In both usage scenarios you will be able to read GPS from flightcontroller and camera attitude from the gimbal for geotagging
STEP 1 – PixHawk
You have two options how to use our system in cooperation with Gremsy:
You will use ENTIRE & MavCam only control tilt / yaw of the gimbal via HereLink hw wheel / on-screen joystick.This setting also apply for direct SBUS control scenario.
In this case is setting simple:
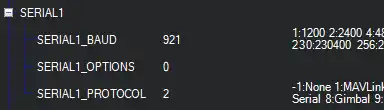
SERIAL1_PROTOCOL: “Mavlink2”
SERIAL1_BAUD: “921600“
MNT1_TYPE: “0”
MNT2_TYPE: “0
Use new Ardupilot gimbal control fatures (like point gimbal automatically)
In this case, gimbal will be controlled by the Cube and ENTIRE & MavCam will command Cube directly to control attitude of the gimbal. For this case you have to set:
SERIAL1_PROTOCOL: “Mavlink2”
SERIAL1_BAUD: “921600“
MNT1_DEFLT_MODE: “3”
MNT1_TYPE: “6”
RC6_OPTION: “214”
RC7_OPTION: “212”
RC8_OPTION: “213”
MNT1_RC_RATE: “90”
For newest Ardupilot firmwares you need to also set:
CAM1_TYPE: “5”
If you do not have this option in your Ardupilot firmware parameters, ENTIRE will work by default.
Baudrate!Use SERIALx_BAUD 921600 in all cases, even if Gremsy manual suggest lower value, use 921600bps. It is because ENTIRE transfers lots of additional information via communication line so bandwidth is important.
Other configuration!Configuration may change over time, please check Gremsy manuals for more information.
STEP 2 – PixyS
Connect your gimbal to gTune app in your phone or PC
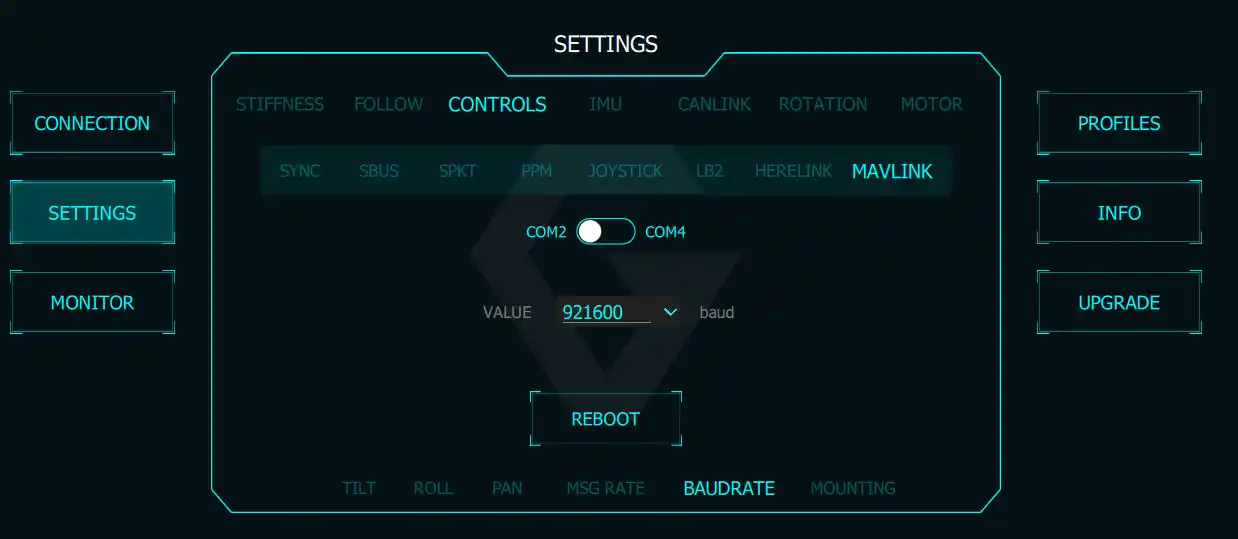
Configure COM2 baudrate to 921600bps (used for connection to Cube)
Configure COM4 baudrate to 230400bps (used for ENTIRE connection)
Navigate to SETTINGS->CONTROLS->MAVLINK
Configure COM4 baudrate to 230400bps (used for ENTIRE connection)
Make sure you clicked REBOOT after each change
If you don’t wish to use MavLink control, and use SBUS control directly to the gimbal, you need to set gimbal to SBUS control mode at this point.
STEP 3 – Camera
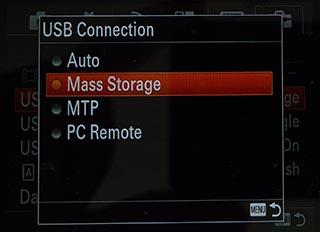
Turn the camera USB mode to MASS STORAGE
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
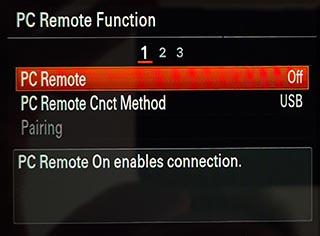
For newer cameras (like A7RIV) is this step bit more complicated:
Check if MENU->NETWORK->Ctrl w/ Smartphone is OFF
Check if MENU->NETWORK->PC Remote Function is OFF
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
Enable Remote Ctrl option in the camera (this option enables IR remote control in the camera)
STEP 4 – ENTIRE
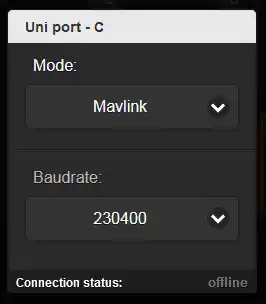
Open ENTIRE’s MENU web page and set UNI-C port to
MavLink mode
230400 bps
STEP 5 – ENTIRE
If all configuration was done properly, you will get UNI-C “online” and see
GPS information update speed
ATTI information update speed
Gimbal angle readings (P-pitch / Y-yaw)
(YAW information is absolute heading)
STEP 6 – ENTIRE
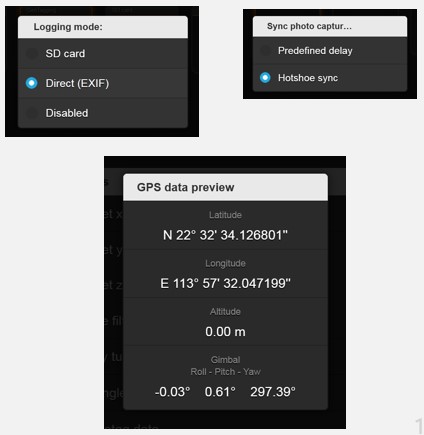
Enable GeoTagging via MENU->Logging mode-> Direct EXIF (or SD card)
Enable HotShoe capturing via MENU->Capture detection->Hotshoe sync
Now you can also preview GPS data and gimbal angles in the Entire’s GUI
MENU->(Geotagging)Settings->GPS Data Preview
Data shown in the preview are updated online and should react to gimbal movements
STEP 7 – ENTIRE
Open the MENU -> Miscellaneous
Scroll down to GeoTagging features
And insert X, Y, Z offsets.
When GPS is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna.
When RTK is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna A.
Offset is in millimeters!
STEP 8 – ENTIRE
Your setup is ready to be used at this point
Entire has Self-Test routines for GeoTagging to easily check if all wiring is working well
Make sure that all equipment is turned ON and camera is set to MASS STORAGE MODE
Click to MENU->Configuration test and let the Entire to do a self-test
At the beginning of the test, one photo will be triggered
Entire will check if HotShoe sensor has properly recognized trigger
Entire will check all necessary input data connections
In case of any problems, result will provide hints to solve the issue
Test photo will not be geotagged in the test method!
STEP 9
Check how geotagging works before first tests!
Understanging of geotagging procedure will save you lots of confusion during testing phase
Gimbal control (OBSOLETE) This option is used to control of the gimbal Pitch and Yaw via AIR Commander Link.
Force SBUS mode (OBSOLETE) This option forces gimbal to use SBUS mode. At latest firmwares of the Gremsy (765 and later), gimbal locks in MavLink mode, once Entire is connected. Entire can force gimbal to use SBUS mode via MavLink (with this option enabled). You have to set gimbal to SBUS control mode also via gTune app. If you would like to use MavLink control of the gimbal, leave this option disabled and enable “MavLink forwarding“.
MavLink forwarding (OBSOLETE) With this option enabled will the Entire forward all input MavLink data (received from PixHawk) to the Gremsy gimbal and also all data received from the gimbal are forwarded to the PixHawk. This option is used when gimbal is controlled via MavLink ot you need to get direct communication with gimbal for example from ground station.
Gimbal tuning (Herelink) This option enables remote configuration of stabilization parameters. Remote settings of those values are available only from MavCam (HereLink app).
Installation basics
Here is a list of cables specific for Pixy-S installation. All cables needed for installation are included in Gremsy NEO set for Pixy-S.
Important!Do not skip steps or dismiss if result is not as described. If system does not behave as described, check again wiring and configuration.
Firmware!Majority of features used here are available only with latest firmware!
Make sure you updated your ENTIRE and also Gimbal to latest firmware!
CompatibilityThis new set is compatible with all new features of aArdupilot for Gremsy. Connection between flightcontroller and Gremsy is not affected. Our cable set only adds connection of COM4 to the ENTIRE for geotagging and gimbal angles reading.
Wiring for Gremsy Pixy-S
STEP 1
Let’s start with connection of Gremsy COM port
Connect PixyS COM cable to the quickrelease COM port
Cable has two endings:
One end with GH connector is for PixHawk Cube connection
Second end with SH connector is for ENTIRE UNI-C (or A or B) connection
STEP 2
GH end of PixyS COM cable connect to your PixHawk flight controller telemetry port 1 or 2
STEP 3
Connect SH ending to the ENTIRE UNI-C (you can also use A or B port, however in this manual we will use UNI-C)
STEP 4
Connect PixyS AUX cable to Gremsy quick release AUX port
STEP 4a
Connect PixyS AUX cable to Gremsy quick release USB-C port
Depending on your needs, you may heat up connector sligthly (around 100°) and gently bend the cable per your needs
STEP 5
Connect PixyS AUX cable SH ends to matching ENTIRE ports:
EXT
USBMULTI
STEP 6
At this point should your wiring of quickrelease look like this
Now you can connect power to the ENTIRE (connector PWR) via original cable
Than you can fix the ENTIRE to the drone
STEP 7
Connect original HotShoe connector for Gremsy to Xsync connector and the camera
STEP 8
Connect PixyS Multiport cable to the gimbal and the camera
STEP 9
Connect original HDMI cable
STEP 10
Thread up the IR cable behind USB and HDMI to the top of the camera and than to IR sensor of the camera
You can push IR cable under hotshoe connector to fix it on place
Mount IR LED to the camera and make sure IR LED is placed directly at IR sensor of the camera
You may heat up isolation (approx. 100°C) close to IR LED and gently bend the cable per your needs
Configuration
There are two options:
MavLink control
SBUS control
Configuration differs at STEP1 -(1) and STEP2
In both usage scenarios you will be able to read GPS from flightcontroller and camera attitude from the gimbal for geotagging
STEP 1 – PixHawk
You have two options how to use our system in cooperation with Gremsy:
You will use ENTIRE & MavCam only control tilt / yaw of the gimbal via HereLink hw wheel / on-screen joystick.This setting also apply for direct SBUS control scenario.
In this case is setting simple:
SERIAL1_PROTOCOL: “Mavlink2”
SERIAL1_BAUD: “921600“
MNT1_TYPE: “0”
MNT2_TYPE: “0
Use new Ardupilot gimbal control fatures (like point gimbal automatically)
In this case, gimbal will be controlled by the Cube and ENTIRE & MavCam will command Cube directly to control attitude of the gimbal. For this case you have to set:
SERIAL1_PROTOCOL: “Mavlink2”
SERIAL1_BAUD: “921600“
MNT1_DEFLT_MODE: “3”
MNT1_TYPE: “6”
RC6_OPTION: “214”
RC7_OPTION: “212”
RC8_OPTION: “213”
MNT1_RC_RATE: “90”
For newest Ardupilot firmwares you need to also set:
CAM1_TYPE: “5”
If you do not have this option in your Ardupilot firmware parameters, ENTIRE will work by default.
Baudrate!Use SERIALx_BAUD 921600 in all cases, even if Gremsy manual suggest lower value, use 921600bps. It is because ENTIRE transfers lots of additional information via communication line so bandwidth is important.
Other configuration!Configuration may change over time, please check Gremsy manuals for more information.
STEP 2 – PixyS
Connect your gimbal to gTune app in your phone or PC
Configure COM2 baudrate to 921600bps (used for connection to Cube)
Configure COM4 baudrate to 230400bps (used for ENTIRE connection)
Navigate to SETTINGS->CONTROLS->MAVLINK
Configure COM4 baudrate to 230400bps (used for ENTIRE connection)
Make sure you clicked REBOOT after each change
If you don’t wish to use MavLink control, and use SBUS control directly to the gimbal, you need to set gimbal to SBUS control mode at this point.
STEP 3 – Camera
Turn the camera USB mode to MASS STORAGE
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
For newer cameras (like A7RIV) is this step bit more complicated:
Check if MENU->NETWORK->Ctrl w/ Smartphone is OFF
Check if MENU->NETWORK->PC Remote Function is OFF
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
Enable Remote Ctrl option in the camera (this option enables IR remote control in the camera)
STEP 4 – ENTIRE
Open ENTIRE’s MENU web page and set UNI-C port to
MavLink mode
230400 bps
STEP 5 – ENTIRE
If all configuration was done properly, you will get UNI-C “online” and see
GPS information update speed
ATTI information update speed
Gimbal angle readings (P-pitch / Y-yaw)
(YAW information is absolute heading)
STEP 6 – ENTIRE
Enable GeoTagging via MENU->Logging mode-> Direct EXIF (or SD card)
Enable HotShoe capturing via MENU->Capture detection->Hotshoe sync
Now you can also preview GPS data and gimbal angles in the Entire’s GUI
MENU->(Geotagging)Settings->GPS Data Preview
Data shown in the preview are updated online and should react to gimbal movements
STEP 7 – ENTIRE
Open the MENU -> Miscellaneous
Scroll down to GeoTagging features
And insert X, Y, Z offsets.
When GPS is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna.
When RTK is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna A.
Offset is in millimeters!
STEP 8 – ENTIRE
Your setup is ready to be used at this point
Entire has Self-Test routines for GeoTagging to easily check if all wiring is working well
Make sure that all equipment is turned ON and camera is set to MASS STORAGE MODE
Click to MENU->Configuration test and let the Entire to do a self-test
At the beginning of the test, one photo will be triggered
Entire will check if HotShoe sensor has properly recognized trigger
Entire will check all necessary input data connections
In case of any problems, result will provide hints to solve the issue
Test photo will not be geotagged in the test method!
STEP 9
Check how geotagging works before first tests!
Understanging of geotagging procedure will save you lots of confusion during testing phase
Gimbal control (OBSOLETE) This option is used to control of the gimbal Pitch and Yaw via AIR Commander Link.
Force SBUS mode (OBSOLETE) This option forces gimbal to use SBUS mode. At latest firmwares of the Gremsy (765 and later), gimbal locks in MavLink mode, once Entire is connected. Entire can force gimbal to use SBUS mode via MavLink (with this option enabled). You have to set gimbal to SBUS control mode also via gTune app. If you would like to use MavLink control of the gimbal, leave this option disabled and enable “MavLink forwarding“.
MavLink forwarding (OBSOLETE) With this option enabled will the Entire forward all input MavLink data (received from PixHawk) to the Gremsy gimbal and also all data received from the gimbal are forwarded to the PixHawk. This option is used when gimbal is controlled via MavLink ot you need to get direct communication with gimbal for example from ground station.
Gimbal tuning (Herelink) This option enables remote configuration of stabilization parameters. Remote settings of those values are available only from MavCam (HereLink app).