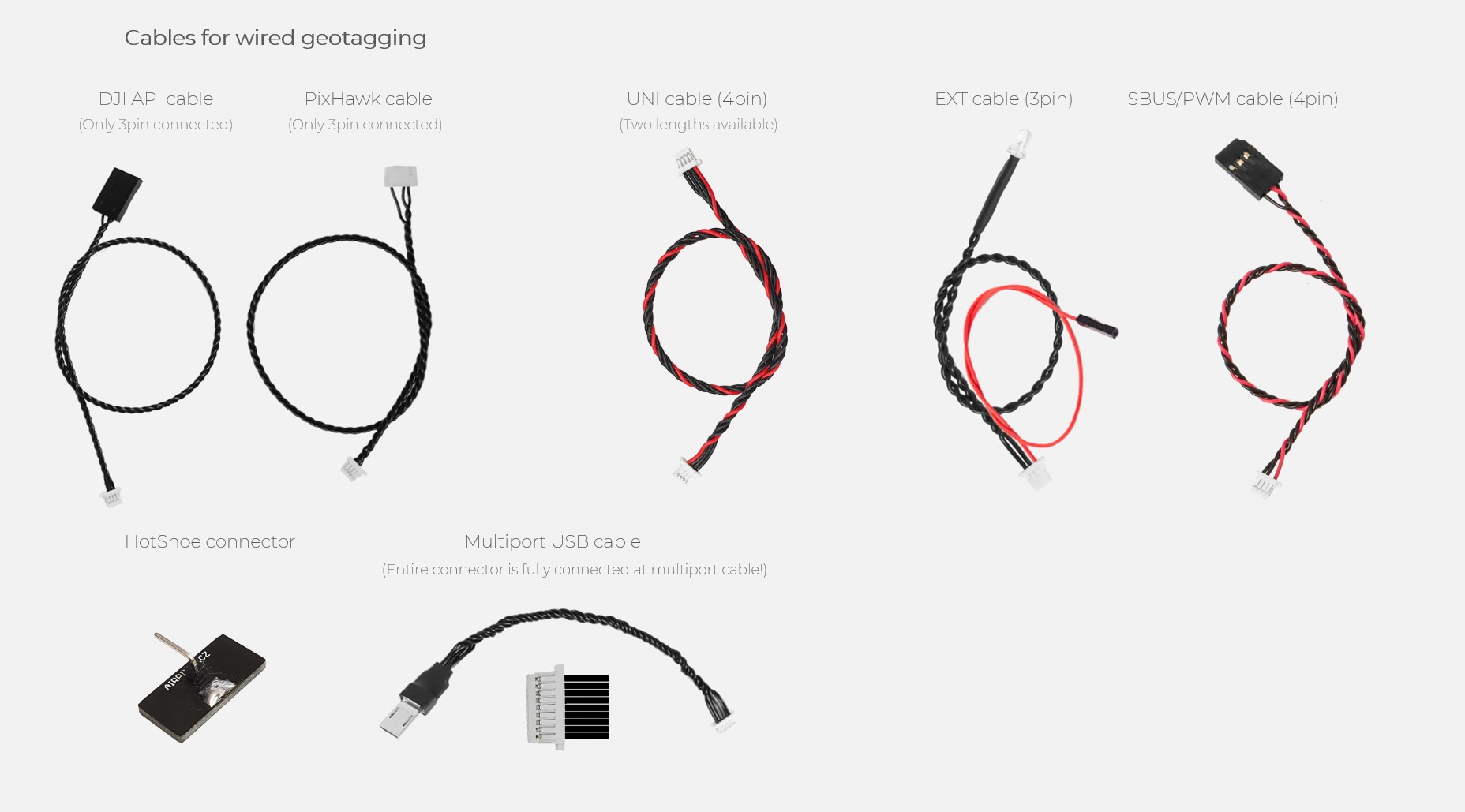
For the GeoTagging mode, the AIR Commander Entire must be connected to Sony or ADTi Camera via Multiport Cable. Multiport cable was included in your geotagging cable set.
For Canon cameras, you have to use WiFi remote control and USB connection is not used!
Important!Do not skip steps or dismiss if result is not as described. If system does not behave as described, check again wiring and configuration.
Connect the PixHawk cable to the Cube Telem 1 or 2
STEP 2
Connect another end of the MavLink cable to the ENTIRE port UNI A/B/C. You are free to any port but we suggest using port UNI C (as A and B have special features which may be useful in the future).
STEP 3
Connect your PixHawk to PC and connect it via Mission Planner
Open Settings Bookmark
From left MENU select FULL PARAMETER TREE
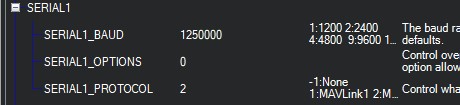
Find section named SERIALx (x is number of port you used)
Configure proper Telemetry port to the budrate of 1 250 000bps
Configure proper Telemetry port to the MavLink2 protocol
STEP 4
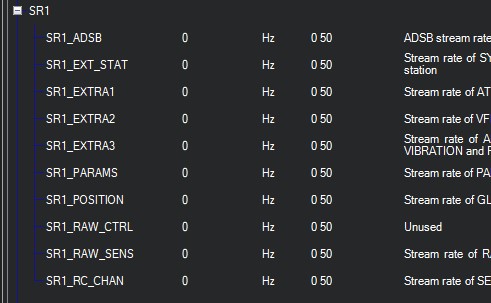
Search section named SRx (x is number of port you used)
Make sure all SRx items are set to 0
STEP 4a
For newest Ardupilot firmware set CAM1_TYPE to 5 (MavLink)
If you do not have this parameter in the list, ENTIRE will work without this configuration.
If you use CAM1 mount already, you can use also CAM2_TYPE
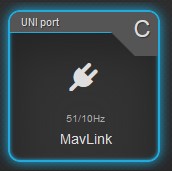
Click to the “UNI port C” bar and in the new window select MavLink & baudrate of 1 250 000. The port should become “online” in a few seconds, if not, do not use other baudrates or other port modes. Check baudrate settings in the Cube (steps above)
Numbers under the icon are input GPS/ATTI stream corresponding to incoming GPS updates frequency and Attitude update frequency. The optimal is 50/10, but numbers may float a bit.
STEP 6
Open Entire’s configuration page
Open MENU -> (geotagging) Settings
From the list select “GPS data preview”
In the popup you should get similar data if the GPS / RTK has enough signal.
Data preview popup is real-time and should change as drone / gimbal moves.
STEP 7
Select camera mount mode to fixed mount depending on your mount of the camer in the drone
FIXED TOP
Camera top is aimping top and lens is looking in direction of the flight
FIXED FORWARD
Camera top is aiming in direction of the flight and lens is looking straigh down
FIXED LEFT/RIGHT
Camera top is aiming left or right and the lens is looking straight down
STEP 8
Select camera Pitch / Yaw offset if camera is not fixed in 90degree offset steps
This step is optional and usually skipped
STEP 9
Open the MENU -> Miscellaneous
Scroll down to GeoTagging features
And insert X, Y, Z offsets.
When GPS is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna.
When RTK is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna A.
Offset is in millimeters!
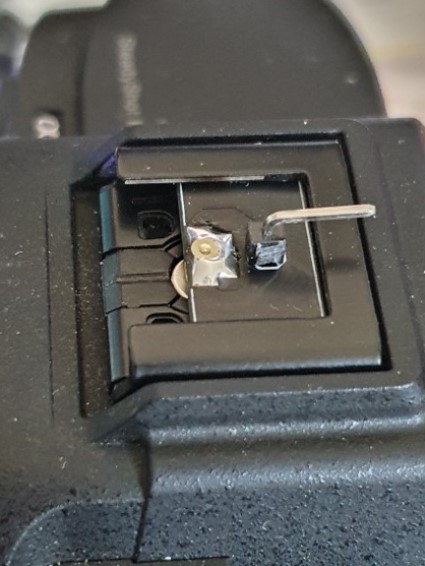
Warning!Do not insert hot-shoe connector reversed!
STEP 10
Insert HotShoe connector into HotShoe of your Camera
Connect HotShoe cable to EXT port of the Entire
Red wire from the cable connect to the pin of HotShoe connector.
IR LED should be mounted at the Camera IR sensor. Only for Sony cameras with IR sensor. ADTi cameras do not need this. If not necessary, you can disconnect the pins of the LED from the EXT connector and use a single red wire only.
STEP 11 (Sony & ADTi)
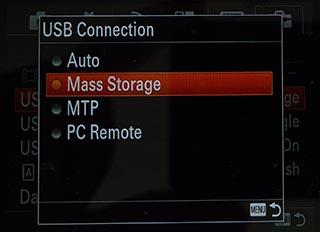
Turn the camera USB mode to MASS STORAGE
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
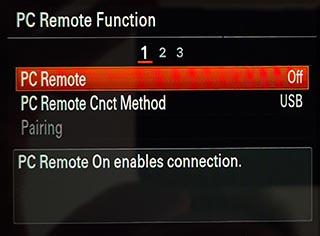
For newer cameras (like A7RIV) is this step bit more complicated:
Check if MENU->NETWORK->Ctrl w/ Smartphone is OFF
Check if MENU->NETWORK->PC Remote Function is OFF
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
STEP 12
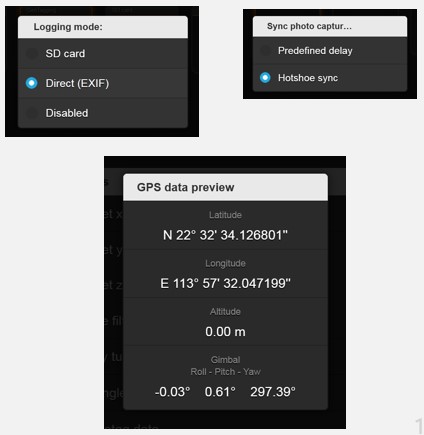
Enable GeoTagging via MENU->Logging mode-> Direct EXIF (or SD card)
Enable HotShoe capturing via MENU->Capture detection->Hotshoe sync
Now you can also preview GPS data in the Entire’s GUI
MENU->(Geotagging)Settings->GPS Data Preview
Data shown in the preview are updated online and should react to frame movements (if frame angles reading is enabled)
STEP 13
Your setup is ready to be used at this point
Entire has Self-Test routines for GeoTagging to easily check if all wiring is working well
Make sure that all equipment is turned ON and camera is set to MASS STORAGE MODE
Click to MENU->Configuration test and let the Entire to do a self-test
At the beginning of the test, one photo will be triggered
Entire will check if HotShoe sensor has properly recognized trigger
Entire will check all necessary input data connections
In case of any problems, result will provide hints to solve the issue
Test photo will not be geotagged in the test method!
Installation basics
For the GeoTagging mode, the AIR Commander Entire must be connected to Sony or ADTi Camera via Multiport Cable. Multiport cable was included in your geotagging cable set.
For Canon cameras, you have to use WiFi remote control and USB connection is not used!
Important!Do not skip steps or dismiss if result is not as described. If system does not behave as described, check again wiring and configuration.
Installation
STEP 1
Connect the PixHawk cable to the Cube Telem 1 or 2
STEP 2
Connect another end of the MavLink cable to the ENTIRE port UNI A/B/C. You are free to any port but we suggest using port UNI C (as A and B have special features which may be useful in the future).
STEP 3
Connect your PixHawk to PC and connect it via Mission Planner
Open Settings Bookmark
From left MENU select FULL PARAMETER TREE
Find section named SERIALx (x is number of port you used)
Configure proper Telemetry port to the budrate of 1 250 000bps
Configure proper Telemetry port to the MavLink2 protocol
STEP 4
Search section named SRx (x is number of port you used)
Make sure all SRx items are set to 0
STEP 4a
For newest Ardupilot firmware set CAM1_TYPE to 5 (MavLink)
If you do not have this parameter in the list, ENTIRE will work without this configuration.
If you use CAM1 mount already, you can use also CAM2_TYPE
Click to the “UNI port C” bar and in the new window select MavLink & baudrate of 1 250 000. The port should become “online” in a few seconds, if not, do not use other baudrates or other port modes. Check baudrate settings in the Cube (steps above)
Numbers under the icon are input GPS/ATTI stream corresponding to incoming GPS updates frequency and Attitude update frequency. The optimal is 50/10, but numbers may float a bit.
STEP 6
Open Entire’s configuration page
Open MENU -> (geotagging) Settings
From the list select “GPS data preview”
In the popup you should get similar data if the GPS / RTK has enough signal.
Data preview popup is real-time and should change as drone / gimbal moves.
STEP 7
Select camera mount mode to fixed mount depending on your mount of the camer in the drone
FIXED TOP
Camera top is aimping top and lens is looking in direction of the flight
FIXED FORWARD
Camera top is aiming in direction of the flight and lens is looking straigh down
FIXED LEFT/RIGHT
Camera top is aiming left or right and the lens is looking straight down
STEP 8
Select camera Pitch / Yaw offset if camera is not fixed in 90degree offset steps
This step is optional and usually skipped
STEP 9
Open the MENU -> Miscellaneous
Scroll down to GeoTagging features
And insert X, Y, Z offsets.
When GPS is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna.
When RTK is used, offset is counted from body center (if correct offset is configured in the FC). If your flight controller does not have configured antennas offsets, configure offset from the camera to the antenna A.
Offset is in millimeters!
Warning!Do not insert hot-shoe connector reversed!
STEP 10
Insert HotShoe connector into HotShoe of your Camera
Connect HotShoe cable to EXT port of the Entire
Red wire from the cable connect to the pin of HotShoe connector.
IR LED should be mounted at the Camera IR sensor. Only for Sony cameras with IR sensor. ADTi cameras do not need this. If not necessary, you can disconnect the pins of the LED from the EXT connector and use a single red wire only.
STEP 11 (Sony & ADTi)
Turn the camera USB mode to MASS STORAGE
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
For newer cameras (like A7RIV) is this step bit more complicated:
Check if MENU->NETWORK->Ctrl w/ Smartphone is OFF
Check if MENU->NETWORK->PC Remote Function is OFF
Navigate to Camera MENU -> SETUP->USB Connection
Set to Mass Storage
confirm OK
STEP 12
Enable GeoTagging via MENU->Logging mode-> Direct EXIF (or SD card)
Enable HotShoe capturing via MENU->Capture detection->Hotshoe sync
Now you can also preview GPS data in the Entire’s GUI
MENU->(Geotagging)Settings->GPS Data Preview
Data shown in the preview are updated online and should react to frame movements (if frame angles reading is enabled)
STEP 13
Your setup is ready to be used at this point
Entire has Self-Test routines for GeoTagging to easily check if all wiring is working well
Make sure that all equipment is turned ON and camera is set to MASS STORAGE MODE
Click to MENU->Configuration test and let the Entire to do a self-test
At the beginning of the test, one photo will be triggered
Entire will check if HotShoe sensor has properly recognized trigger
Entire will check all necessary input data connections
In case of any problems, result will provide hints to solve the issue
Test photo will not be geotagged in the test method!